Manned Ornithopters
Full History
History Archive
Getting Started
How to Design & Build
Competition Info
Design Tools
Design Manual
Newsletter
Free Plans
Teachers Guide
Web Site Links
About the Society
Contact Info


|
|
Full
History of Ornithopters
This page describes the
complete history of unmanned ornithopters, or flapping wing aircraft.
I have described the manned ornithopters on a separate
page. It is important to understand that the record of flapping-wing
devices has not been well-preserved. It is an obscure topic to begin
with. The idea has been frowned upon in the field of aviation. Many
of the researchers either fail to receive widespread publicity,
or deliberately sequester their work. I have spent decades researching
this subject, and I present here the best possible summary of ornithopter
history. However, I am certain that some significant research took
place long ago, of which we have no record. From time to time, findings
of this sort still come to light.
As far as I can tell, the
first ornithopters were flown in France, in the 1870s. Keep in mind
that this was almost a hundred years after the invention of the
hot air balloon. People were looking for another way to fly, and
they drew inspiration from the flight of birds. Bird flight was
the example that proved a heavier-than air method of flight could
exist. The early experiments with unmanned ornithopters were therefore
intended to pave the way for human flight.
However, the unmanned ornithopter
is a fascinating endeavor in its own right. Today, unmanned ornithopters
provide an excellent educational opportunity for students, as well
as great enjoyment for hobbyists. In 2007, many people witnessed
what they thought were robotic dragonflies, being used by the United
States government to spy on civilians. Whether or not that was the
case, ornithopters can indeed be used to carry cameras and other
payloads. They have been used in biological field studies, to chase
birds away from airport runways, and potentially they could be used
to transport various items from place to place.
The first experimental ornithopters
were powered by rubber band, just like some of the models that hobbyists
can build today. The
leftmost illustration shows an ornithopter that was flown by Jobert
in 1871. It was powered by a stretched rubber band turning a crank.
In the following year, Jobert built a biplane (four-winged) ornithopter
with the twisted rubber band motor more common today. The use of
four wings was a clever innovation that reduced the amount of torque
needed to flap the wings. The other ornithopters shown here were
built by Alphonse Penaud and Hureau de Villeneuve, respectively,
in 1872. (These were described by Octave Chanute, in a 1891 article
that would become part of his book, Progress in Flying Machines.)
To clear up a few misconceptions:
It is sometimes claimed that Penaud was the first to build a successful
rubber-powered ornithopter, in 1874. Obviously, whoever made that
statement did not know about the earlier work.
William Hudson Shaw's
biography of Lawrence Hargrave mentions a rubber-band-powered model
flown in 1858 by Pierre Jullien. When I contacted the author for
more information, he clarified it was actually a rubber-band-powered
model airplane, not
an ornithopter.
In 1874, Victor
Tatin devised a more complicated crank mechanism that actively drove
the twisting of the wings. His ornithopter shown here is on exhibit
at the National Air & Space Museum in Washington. Most of the
mechanism was fashioned from bent wire, and it is quite interesting
to examine up close. A similar mechanism was used by Pichancourt
in his toy bird, "l'oiseau mécanique". This was
perhaps the first commercial venture involving ornithopters. Pichancourt
is shown at right with his lovely assistant and the biggest rubber-powered
ornithopter I have ever seen! He must have needed a huge bundle
of rubber to flap those huge wings.
In fact, the
thickness of the rubber band has to increase faster than the scale
of the ornithopter. If you double the wingspan and every other dimension,
the rubber band needs to be more than twice the thickness
of the original. This could be corrected by using some sort of gear
reduction to amplify the torque of the rubber band. However, that
is not so easy to do. Lawrence Hargrave, working in the 1890s, discovered
an easier solution, which many people after him have adopted. To
reduce the torque requirement, he made the flapping wings smaller
and provided a large fixed wing. Two examples are shown below. At
left is one of Hargrave's ornithopters. The center photo shows an
ornithopter built by Alexander Lippisch.
  
Alexander Lippisch
led a group of aviation students during the 1930s. He and his students
built many large ornithopters powered by rubber band and by internal
combustion engines. The science of aeronautics had advanced greatly
since Hargrave. These ornithopers had better airfoils and more efficient
flappers, even though the flapping wings remained comparatively
small.
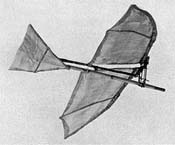
Erich von Holst
experimented with various bird and dragonfly ornithopter configurations
in the 1930s. His work included experimentation with biplane wing
phasing and hinged outer wing panels. Some of his rubber-powered
ornithopters achieved a very high level of realism, as in the example
shown above. In this one, the outer wing panels were hinged, to
more closely mimic the movement of a bird's wings. He used pulleys
to increase the torque.
 Indoor
ornithopter contests began in the 1930s. A model airplane club called
the Chicago Aeronuts was holding various contests for the indoor
flying of model airplanes. For some extra challenge, they decided
to add ornithopters to the list of events. Ed Lidgard's design shown
here could be built from magazine plans, and many of the rubber-band-powered
ornithopters built over the subsequent decades followed a similar
pattern. Eventually the ornithopter event became part of the national
model competition arranged by the Academy of Model Aeronautics. Indoor
ornithopter contests began in the 1930s. A model airplane club called
the Chicago Aeronuts was holding various contests for the indoor
flying of model airplanes. For some extra challenge, they decided
to add ornithopters to the list of events. Ed Lidgard's design shown
here could be built from magazine plans, and many of the rubber-band-powered
ornithopters built over the subsequent decades followed a similar
pattern. Eventually the ornithopter event became part of the national
model competition arranged by the Academy of Model Aeronautics.
 In
the 1980s, it was found that biplane ornithopters had a huge advantage
in these indoor flying contests. With monoplane ornithopters, much
energy was lost at the end of each wingstroke, when the crank went
through its "dead center" position and snapped forward
without doing any useful work. With four wings, you can set it up
so one pair of wings is in mid-stroke, maintaining a load on the
crank, while the other pair is at the end of its stroke. The cranks
don't reach dead center at the same time, so the crank doesn't snap
forward, we can harness the energy of its full rotation, and the
smoother flapping motion allows overall weight reduction. In
the 1980s, it was found that biplane ornithopters had a huge advantage
in these indoor flying contests. With monoplane ornithopters, much
energy was lost at the end of each wingstroke, when the crank went
through its "dead center" position and snapped forward
without doing any useful work. With four wings, you can set it up
so one pair of wings is in mid-stroke, maintaining a load on the
crank, while the other pair is at the end of its stroke. The cranks
don't reach dead center at the same time, so the crank doesn't snap
forward, we can harness the energy of its full rotation, and the
smoother flapping motion allows overall weight reduction.
By coupling
the upstroke of one wing to the downstroke of another, two other
benefits were achieved. First, the upstroke could procede more slowly,
so the wing could continue producing lift during the upstroke. Second,
the lift on that wing would partially offset the force required
for the other wing's downstroke, reducing the overall torque requirement.
 Another
modification was to move the stabilizer to the front of the model.
With the flapping wings at the back of the motor stick, the stabilizer
could be positioned directly above the motor stick and in clean
air where it could function more effectively as a lifting surface. Another
modification was to move the stabilizer to the front of the model.
With the flapping wings at the back of the motor stick, the stabilizer
could be positioned directly above the motor stick and in clean
air where it could function more effectively as a lifting surface.
With these innovations,
ornithopter flight times increased from around four minutes, to
the current record of 21 minutes, 44 seconds held by Roy White.
Successful competition models are extremely light-weight and delicate.
Careful adjustments must be made to maximize the flight time without
hitting the ceiling. Perhaps as you refine your ornithopter skills,
you will be able to log some impressive flight times of your own.
  
The rubber-band-powered
ornithopter also offers a range of interesting projects, aside from
duration contests. Shown above: Ken Johnson's lifelike butterfly
model. John White's ornithopter in which the tail moves as well
as the wings. Albert Kempf's dragonfly using a geared rubber band
motor and foam wings.
Internal
Combustion
There was a
group called The Ornithopter Modelers' Society, founded by Patrick
Deshaye in 1984. It was a group of hobbyists around the world, who
made use of Deshaye's quarterly newsletter to exchange ornithopter
designs and ideas. The society was instrumental in rekindling interest
in ornithopters and accelerating their development. Some of the
members were interested in indoor ornithopter competition, while
others were trying to figure out how to build an ornithopter powered
by an engine instead of a rubber band. We all thought it had never
been done. Gradually, I began to uncover some of the historical
information that you see here.
 For
a long time, we thought Gustave Trouvé had built the first
successful ornithopter. Recently, with the help of biographer Kevin
Desmond, we were able to sort things out a bit. In 1870, Trouve
made an ornithopter powered by compressed air. I am not sure if
it actually flew, and we don't have any pictures of it. The ornithopter
shown here was flown in 1890, not 1870 as previously thought. Twelve
gunpowder charges were fired successively into a bourdon tube to
flap the wings. The ornithopter flew 70 meters in a demonstration
to the French Academy of Sciences. Therefore it appears this was
not the first ornithopter to fly, but it was the first to use a
type of internal combustion engine. For
a long time, we thought Gustave Trouvé had built the first
successful ornithopter. Recently, with the help of biographer Kevin
Desmond, we were able to sort things out a bit. In 1870, Trouve
made an ornithopter powered by compressed air. I am not sure if
it actually flew, and we don't have any pictures of it. The ornithopter
shown here was flown in 1890, not 1870 as previously thought. Twelve
gunpowder charges were fired successively into a bourdon tube to
flap the wings. The ornithopter flew 70 meters in a demonstration
to the French Academy of Sciences. Therefore it appears this was
not the first ornithopter to fly, but it was the first to use a
type of internal combustion engine.

|
|
1890.
Lawrence Hargrave built some ornithopters powered by steam
and compressed air. The ornithopter shown here is about 2
meters long and hangs in the National Air & Space Museum.
Hargrave used a rear fixed wing, like the tail of a bird but
much larger in size and carrying more weight. This eliminated
the need for gear reduction and therefore simplified the construction.
|

|
|
1930s.
Alexander Lippisch and members of his NSFK group in Germany
constructed a number of piston-driven ornithopters. One of
Lippisch's ornithopters had a 3 meter wingspan and weighed
1950 grams. Using a 4 cc petrol engine, it made flights up
to 16 minutes. Lippisch also designed the Me 163 rocket-powered
fighter aircraft.
|

|
|
1935.
Vincenz Chalupsky built a series of ornithopters that could
be powered either by compressed air or carbon dioxide. These
ornithopters had a birdlike appearance. |
|
seeking photo
|
|
1935.
In Walden NY around 1935-1936, Early Bird pilot Harry D. Graulich
flew in tethered flight an engine-powered ornithopter with about
a 4.8 meter wingspan. It was powered by a four-cylinder, air-cooled
engine.
|

|
|
1958.
Percival Spencer constructed a series of engine-driven ornithopters
in the shape of a bird. They ranged in size from a small 0.02-engine-powered
ornithopter to one with an eight-foot wingspan. Spencer is also
noted as a pioneer pilot and the designer of the Republic Seabee
amphibious airplane. He also designed a toy, called the Wham-O
Bird, which introduced thousands of children to the idea of
mechanized flapping-wing flight.
|

|
|
1960.
Spencer collaborated with Jack Stephenson to build the Orniplane.
This was the first radio-controlled ornithopter. It now resides
at the New England Air Museum in Windsor Locks, CT. Spencer
sought funding to build a manned version. The biplane wing
configuration was to provide a smoother ride for the pilot
and also protected the sensitive early radio equipment. Reportedly,
Spencer's colleague Dale Anderson later converted one of Spencer's
Seagull ornithopters to radio control as well, using the improved
radio equipment of the 1980s.
|
Electric
Power
In
the end, it became more practical to use electric motors, instead
of internal combustion engines, to power at least the unmanned ornithopters.
Electric motors simplify the construction and make the ornithopters
more convenient to operate. The power-to-weight ratio is comparable
to internal combustion engines.

|
|
1984.
Valentin Kiselev's radio controlled, tandem-wing ornithopter
is shown. This ornithopter was powered by an internal combustion
engine. Kiselev also flew some of the first electric ornithopters.
|

|
|
1986.
Despite being underpowered, Paul MacCready's QN pterosaur replica
achieved new levels of realism and demonstrated active stabilization
methods like those used by birds and other flying animals. The
otherwise-unstable ornithopter had an onboard computer to keep
it from going into a spin. The flight path was controlled by
radio. It had a wingspan of 18 feet.
|

|
|
1990.
Horst Räbiger's radio-controlled ornithopter, EV7, was
a technical marvel, using thick-airfoil wings and a pneumatic
spring to provide extra power in the downstroke. In this ornithopter,
the twisting of the wings was actively driven by the motor,
whereas most ornithopter wings twist in response to aerodynamic
forces. |

|
|
1991.
James DeLaurier and Jeremy Harris flew a large radio-controlled
ornithopter, powered by internal combustion. The wing appeared
similar to the EV7's, but it used passive aeroelastic wing twisting.
The news media inaccurately reported this as the first engine-powered,
radio-controlled ornithopter, at a time when few people knew
about the prior successes.
|

|
|
1998.
Albert Kempf's Truefly ornithopter used electric power and
actively twisted foam wings. Kempf reported that this system
was very energy-efficient. Kempf went on to build some other
ornithopters using a similar mechanism. One of the ornithopters
was made to resemble an eagle and was more realistic looking
than the initial design shown here. |

|
|
1998.
Sean Kinkade's Skybird, based somewhat on the Spencer Seagulls
and using a 0.15 methanol-fueled engine, was an attempt at small-scale
commercial production of an RC ornithopter. Smaller, electric
versions were later offered. Unfortunately, many would-be enthusiasts
paid their money and never received the product.
|

|
|
2000.
Some applications for ornithopters rely on their resemblance
to real birds. Intercept Technologies experimentally used radio-controlled
ornithopters for bird control. Styled to look like birds of
prey, the RoboFalcon ornithopters were used to chase flocks
of birds away from airports, where they can pose a threat to
aircraft. |

|
|
2003.
Neuros Company of Korea introduced the first commercially
mass-produced RC ornithopter. Called the Cybird, it was sold
in two different versions. The Cybird P2 had a 39" wingspan
and three-channel radio control. The later-introduced Cybird
P1 had a 29" wingspan and two-channel radio. |

|
|
2007.
Robert Musters began a series of RC ornithopters with foam,
actively twisted wings. The appearance of these ornithopters
is close to that of a real bird and they are being offered for
use in bird control at airports. |

|
|
2008.
Nathan
Chronister built this four-winged RC ornithopter for a demonstration
at IIT Bombay. It represents a concept for a manned ornithopter
at 1/10th scale. The wingspan is 36 inches. The four-winged
design gives this ornithopter excellent slow-flight capabilities,
and it can even be configured for hovering flight. |
 |
|
2013.
The
S-1 Robotic Bird, developed by Nathan Chronister and marketed
by BirdKit.com, takes advantage of new servo technology developed
by Hitec to mimic the muscles of a real bird. This new paradigm
allows total control over the wing movements, in contrast to
the typical crank mechanism with its set range of motion. |
Micro Air
Vehicle (MAV) Ornithopters
Micro air vehicles,
also known as MAVs, result from the US military's interest in miniature
spying devices. The Defense Advanced Research Projects Agency (DARPA)
has heavily funded some of these projects. Small radio-controlled
ornithopters can carry a camera payload for spying inside buildings.
The ultimate goal is to produce an ornithopter so small and lifelike
that it can pass as a real insect or small bird, going unnoticed
as it performs its deadly mission. With recent advances in hobby
radio control products, now you can build your own micro-sized ornithopters
and spy on your neighbors.

|
|
1970s.
The US Central Intelligence Agency developed its first tiny
ornithopter for spying. It was powered by a gas-producing chemical
reaction through a combination of flapping wings and jet propulsion.
It had a 9 cm wingspan, weighed only a gram, and flew for up
to 60 seconds. It was supposed to be controlled by some kind
of laser guidance system, but that turned out not to be very
effective. |

|
|
1997.
Nathan Chronister built a four-winged ornithopter that could
hover using a vertical wingstroke. This is similar to dragonflies,
but different from the hovering ornithopters that would follow.
It was not radio controlled but demonstrated a stable hovering
flight. |

|
|
2000.
The MicroBat, developed by Aerovironment and Caltech, was the
first micro-sized ornithopter resulting from MAV funding. It
had three-channel radio control and used one of the lithium-polymer
batteries which had just become available.
|

|
|
2002.
Mentor, developed at University of Toronto, was the first hovering
ornithopter with radio control. (There was hovering prior to
this, but it was not radio controlled.) Hovering is important
for MAV applications that require maneuvering in tight spaces. |

|
|
2003.
The
Luna ornithopter model kit introduced a simple scissor-wing
design, which simplified construction and led to a proliferation
of four-winged ornithopters. (The Ornithopter Zone model kit
was based on 1993 plans.) |

|
|
2005.
Yusuke Takahashi converted the Luna to remote control, and
discovered that with the addition of an elevator control function,
the already slow-flying design could be made to hover. Takahashi
has built many other micro-sized RC ornithopters with very creative
designs. |

|
|
2006.
At the first International Micro Air Vehicle Competition, university
teams competed to see who could perform the most pylon circuits
with the smallest ornithopter. This annual event is held in
a different location each year and also includes rotary-driven
MAVs. (Utah entry is shown.)
|

|
|
2006.
Delfly, developed at the Technical University of Delft and Wageningen
University, is able to transition between hovering and forward
flight. These ornithopters also carry a small video camera.
The live images are analysed by a computer on the ground, giving
Delfly the capacity for autonomous navigation. (The newest version
as of 2013 has an onboard visual navigation system.)
|

|
|
2007.
This ornithopter developed by Nathan Chronister can hover and
perform aerobatic maneuvers. This ornithopter achieved a MAV
benchmark because it is the size and weight of a real hummingbird.
The ornithopter weighs 3.3 grams and has a 15 cm wingspan. |

|
|
2007.
Currently the world's smallest radio-controlled ornithopter,
this one constructed by Petter Muren has a wingspan of 10 cm
and weighs only 1 gram. |

|
|
2010.
Aerovironment's Nano Hummingbird, while not especially small,
was a huge breakthrough in MAV ornithopter research because
of its gyroscopically stabilized flight without any tail surfaces. |
|
|

